An Engine for Nanomedicine and Nanotechnology
For nanomedicine and nanotechnology the structural model of an engine is determined. The structural scheme of an engine is constructed. For an engine its matrix equation of the deformations is received for the decision of control systems. The parameters and characteristics of an engine are obtained.
Introduction
For control system of nanomedicine and nanotechnology an engine on piezoelectric or electrostrictive effect is applied [1, 2, 3, 4, 5, 6, 7, 8, 9]. For the structural schema of an engine its energy transformation is clearly [4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16]. The piezo engine is used for precise movements in adaptive optics and microscopy [11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26].
Structural Model and Scheme
The equations [8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, 49, 50] of an electro elastic engine have form $$ (D) = (d) (T) + \left(\varepsilon^ {T}\right) (E) $$ $$ \left(S\right) = \left(s ^ {E}\right) \left(T\right) + \left(d\right) ^ {t} \left(E\right) $$ $$ (D), (d), (T), \left(\varepsilon^ {T}\right), (E), (S), \left(s ^ {E}\right), \left(d\right) ^ {t}; $$ where are matrixes electric induction, piezo coefficient, strength mechanical field, dielectric constant, strength electric field, relative displacement, elastic compliance, transposed piezo coefficient.
For PZT engine its matrixes coefficients
0 0 0 0 0 d
$$ 0 = \left( \begin{array}{c c c c c c} 0 & 0 & 0 & 0 & d _ {1 5} & 0 \\ 0 & 0 & 0 & d _ {1 5} & 0 & 0 \\ d _ {3 1} & d _ {3 1} & d _ {3 3} & 0 & 0 & 0 \end{array} \right) $$
15 ( ) 0 0 0 0 0
d d
= −
0 0 0 E E E
s s s
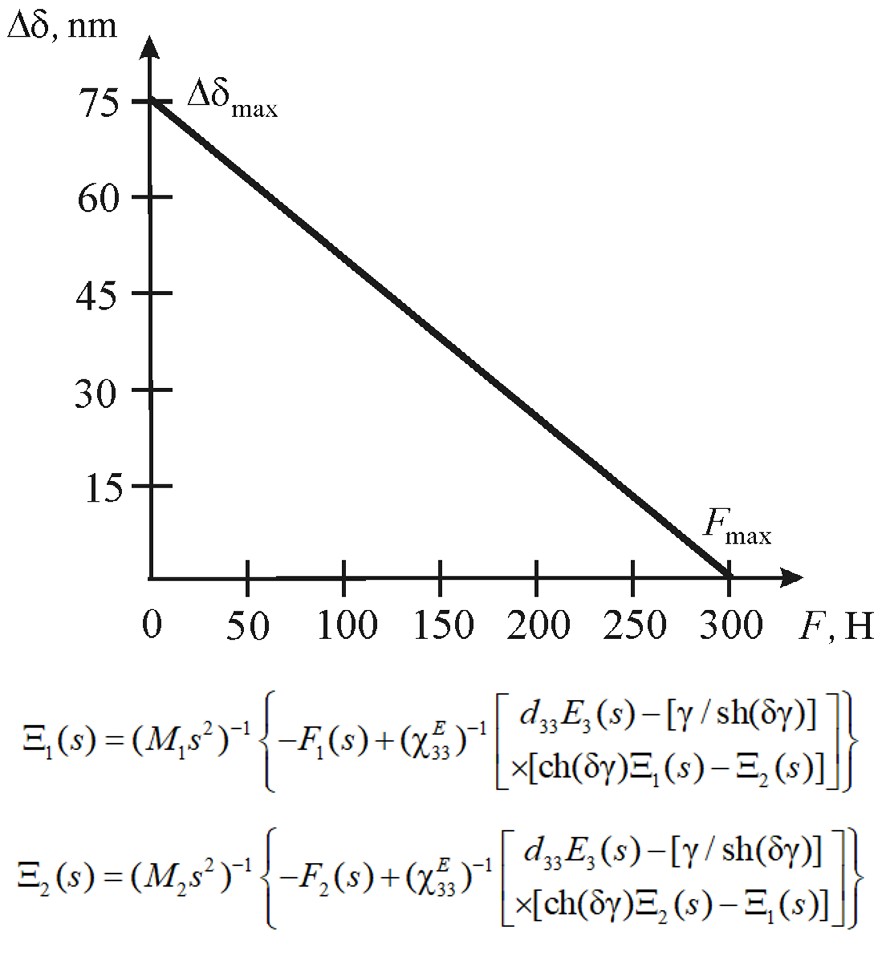
11 12 The equation of the mechanical characteristic of an engine is obtained $$ \Delta l = \Delta l _ {\max } \left(1 - F / F _ {\max }\right) $$
$$ \mathrm {w h e r e} \quad \Delta l _ {\max } = d _ {m i} E _ {m} l \mathrm {a t} F = 0 \mathrm {a n d} F _ {\max } = d _ {m i} E _ {m} S _ {0} / s _ {i j} ^ {E} \mathrm {a t} $$
0 = ∆l , mi d is the piezo module, m E is strength of electric field for m axis, E ijs is the elastic compliance, l is the length,
0 S is the area of an engine.
For the longitudinal PZT engine its relative displacement [8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18] is written $$ S _ {3} = d _ {3 3} E _ {3} + s _ {3 3} ^ {E} T _ {3} $$ where d_33 is longitudinal piezo module, 3 _E is strength electric field for 3 axis, 33 E s is elastic compliance, 3 T is strength mechanical field for 3 axis.
In the mechanical characteristic of the longitudinal PZT engine for nanomedicine and nanotechnology its maximums values of displacement max δ ∆ and force max F are determined $$ \Delta \delta_ {\max } = d _ {3 3} \delta E _ {3} = d _ {3 3} U $$ $$ V, F _ {\max } = d _ {3 3} S _ {0} E _ {3} / s _ {3 3} ^ {E} $$ At 3
E = 0.75∙105 V/m, d33= 4∙10-10 m/V,
$$ \Delta \delta_ {\max } = 7 5 \mathrm {n m}, F _ {\max } $$
= 300 N on Figure
1 with error 10%.
Also for the mechanical characteristic of the transverse PZT engine its maximums values , max 31 3 0 11 / E F d E S s = At 5 3 1.2 10 V/m E = ⋅ , 10 31 2 10 m/V d − = ⋅ , 2 1 10 m h − = ⋅ , , 5 2 0 1 10 m S − = ⋅ , 12 2 11 12 10 m /N E S − = ⋅ for the transverse PZT engine are received $$ \delta = 0. 5 \cdot 1 0 ^ {- 3} \mathrm {m} $$ $$ \Delta h _ {\max } = 2 4 0 \mathrm {n m}, F _ {\max } = 2 0 \mathrm {N}. $$ The differential equation of an engine [8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, 49, 50] is written $$ \frac {d ^ {2} \Xi (x , s)}{d x ^ {2}} - \gamma^ {2} \Xi (x, s) = 0 $$ $$ \gamma = s / c ^ {E} + \alpha $$ here s, ( , ) x s Ξ , x , γ are the parameter, the Laplace transform of its displacement, the coordinate and the coefficient.
For the longitudinal PZT engine its displacements $$ \Xi (0, s) = \Xi_ {1} (s) \mathrm {f o r} x = 0 $$ $$ \Xi (\delta , s) = \Xi_ {2} (s) $$ for x= δ The decision of differential equation is determined $$ \Xi (x, s) = \left\{\Xi_ {1} (s) \mathrm {s h} \left[ (\delta - \mathrm {x}) \gamma \right] + \Xi_ {2} (s) \mathrm {s h} \left(\mathrm {x} \gamma\right) \right\} / \mathrm {s h} (\delta \gamma) $$ Also the Laplace transforms of forces on its faces are received $$ T _ {3} (0, s) S _ {0} = F _ {1} (s) + M _ {1} s ^ {2} \Xi_ {1} (s) $$ for x=0 $$ T _ {3} \left(\delta , s\right) S _ {0} = - F _ {2} (s) - M _ {2} s ^ {2} \Xi_ {2} (s) \mathrm {f o r} x = \delta $$ where 1_F_ , 2 F , 1 M , 2 M are the forces, the masses.
The Laplace transforms of the mechanical stresses for the longitudinal PZT engine are obtained $$ \left. \frac {1}{3} (0 , s) = \left(s _ {3 3} ^ {E}\right) ^ {- 1} \frac {d \Xi (x , s)}{d x} \right| - d _ {3 3} \left(s _ {3 3} ^ {E}\right) ^ {- 1} E _ {3} (s) $$ d x s T s s d s E s dx $$ = \left(s _ {3 3} ^ {E}\right) ^ {- 1} \frac {d \Xi (x , s)}{d x} \Bigg | - d _ {3 3} \left(s _ {3 3} ^ {E}\right) $$
1 1 3 33 33 33 3 0
x = $$ T _ {3} \left(\delta , s\right) = \left(s _ {3 3} ^ {E}\right) ^ {- 1} \frac {d \Xi (x , s)}{d x} \Bigg | _ {x = \delta} - d _ {3 3} \left(s _ {3 3} ^ {E}\right) ^ {- 1} E _ {3} (s) $$ Therefore, the structural model of the longitudinal PZT engine is determined
$$ \chi_ {3 3} ^ {E} = s _ {3 3} ^ {E} / S _ {0} $$
where 1 2 ( ), ( ) s s Ξ Ξ are the Laplace transforms of its displacements.
Also the system of the equations for the Laplace transforms of stresses an engine is written ( , ) (0, ) ( ) ( ) ( ) j ij mi ij m x d x s T s s v s s dx $$ = \left(s _ {i j} ^ {\Psi}\right) ^ {- 1} \frac {d \Xi (x , s)}{d x} \left| - v _ {m i} \left(s _ {i j} ^ {\Psi}\right) ^ {- 1} \Psi_ {n} \right| $$
1 1 $$ \left. s _ {i i} ^ {\Psi}\right) ^ {- 1} \frac {d \Xi (x , s)}{\left| \right.} - v _ {i i} \left(s _ {i i} ^ {\Psi}\right) ^ {- 1} $$
0 = $$ T _ {j} (l, s) = \left(s _ {i j} ^ {\Psi}\right) ^ {- 1} \frac {d \Xi (x , s)}{d x} \Bigg | _ {x = l} - v _ {m i} \left(s _ {i j} ^ {\Psi}\right) ^ {- 1} \Psi_ {m} (s) $$ where vmi is electro elastic coefficient, l is length.
The structural model of an engine Figure 2 for nanomedicine and nanotechnology is determined
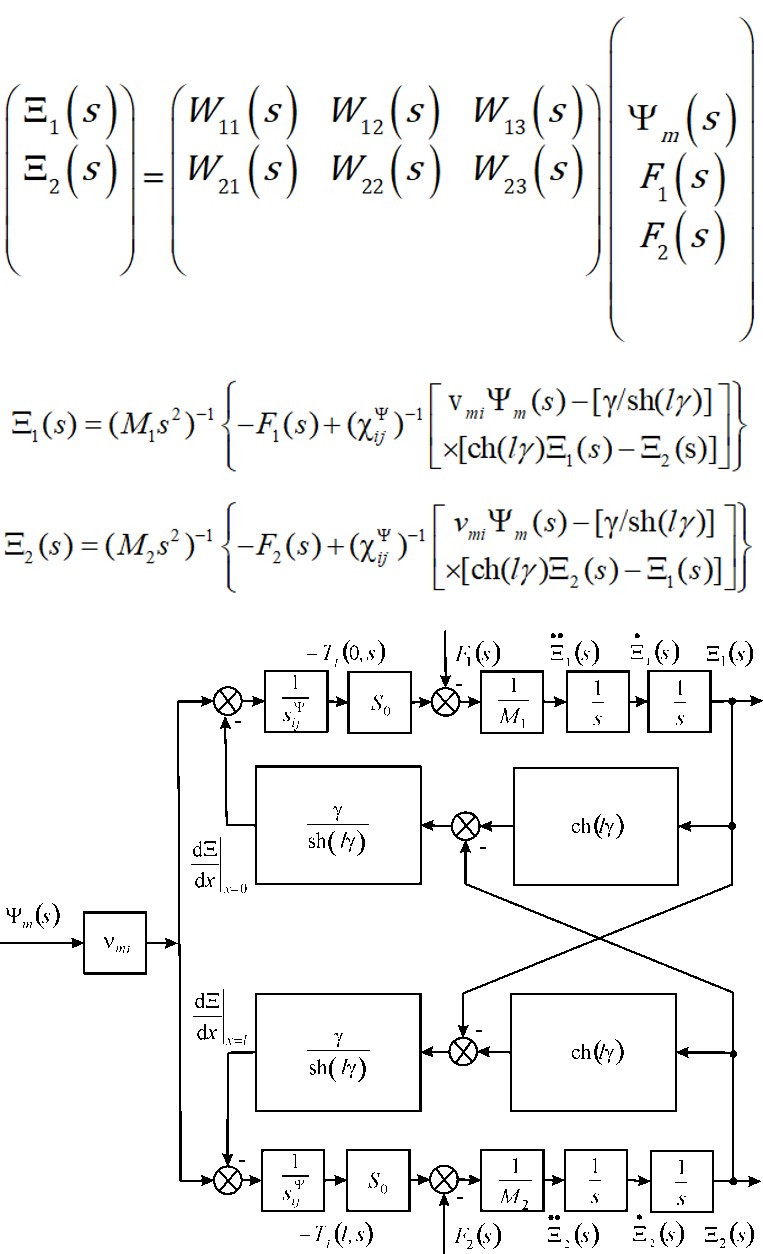
$$ \chi_ {i j} ^ {\Psi} = s _ {i j} ^ {\Psi} / S _ {0} $$
, , , , m $$ v _ {m i} = \left\{ \begin{array}{l l} d _ {3 3}, d _ {3 1}, d _ {1 5} \\ g _ {3 3}, g _ {3 1}, g _ {1 5}, \end{array} \right. $$ $$ \Psi_ {m} = \left\{ \begin{array}{l l} E _ {3}, E _ {1} \\ D _ {3}, D _ {1}, \end{array} \right. $$
3 1 $$ s _ {i j} ^ {\Psi} = \left\{ \begin{array}{l l} s _ {3 3} ^ {E}, s _ {1 1} ^ {E}, s _ {5 5} ^ {E} \\ s _ {3 3} ^ {D}, s _ {1 1} ^ {D}, s _ {5 5} ^ {D}, l \end{array} \right. $$ , , , , E E E ij D D D s s s s s s s $$ c ^ {\Psi} = \left\{c ^ {E}, c ^ {D} \right. $$ $$ \gamma = \left\{\gamma^ {E}, \gamma^ {D} \right. $$
33 11 55 $$ l = \left\{\delta , h, b \right| $$
, , .
33 11 55
The structural scheme on Figure 2 is used for decision of deformations an engine for system of nanomedicine and nanotechnology.
Parameters and characteristics Therefore, the matrix of the deformations an engine for nanomedicine and nanotechnology is determined
The steady-state movements its faces are written The steady-state movements the faces of the longitudinal PZT engine are received $$ \begin{array}{l} \xi_ {1} = d _ {3 3} U M _ {2} / \left(M _ {1} + M _ {2}\right) \\ \xi_ {2} = d _ {3 3} U M _ {1} / \left(M _ {1} + M _ {2}\right) \\ \end{array} $$ $$ \mathrm {A t} U = 1 2 5 \mathrm {V}, M _ {1} = 1 \mathrm {k g}, M _ {2} $$
M = 4 kg, d33= 4⋅10-10 m/V the steady-state movements
$$ \xi_ {1} = 4 0 \mathrm {n m}, \xi_ {2} = 1 0 \mathrm {n m} \mathrm {a n d} $$ $$ \xi_ {1} + \xi_ {2} = 5 0 \mathrm {n m} $$ and error 10%.
The transfer equation of the transverse PZT engine for elastic-inertial load is determined E
31 2 2 ( ) ( ) ( ) 2 1
$$ W (s) = \frac {\Xi (s)}{U (s)} = \frac {k _ {3 1} ^ {E}}{T _ {t} ^ {2} s ^ {2} + 2 T _ {t} \xi_ {t} s + 1} $$ t t t $$ k _ {3 1} ^ {E} = d _ {3 1} \left(h / \delta\right) / \left(1 + C _ {l} / C _ {1 1} ^ {E}\right) $$
11 / ( ) E t l T M C C = + ,
is the transverse transfer coefficient, Cl, 11 E C are the where stiffness for load, engine, $T_i$, $\xi_i$, $\omega_i$ are the time constant, the attenuation coefficient, the conjugate frequency of the engine.
At $C_i = 0.1 \cdot 10^7$ N/m, $C_{11}^E = 1 \cdot 10^7$ N/m, $M = 2$ kg the parameters of the transverse PZT engine are obtained $T_i = 0.43 \cdot 10^{-3}$ s, $\omega_i = 2.3 \cdot 10^3$ s$^{-1}$ with error 10%.
The steady-state movement of the transverse PZT engine at elastic-inertial load is determined
$$\Delta h = \frac{d_{31}(h/\delta)U}{1 + C_i/C_{11}^E} = k_{31}^E U$$
At $h/\delta = 20$, $C_i/C_{11}^E = 0.1$, $d_{31} = 2 \cdot 10^{-10}$ m/V for the transverse PZT engine is received the transverse transfer coefficient $k_{31}^E = 3.6$ nm/V.
Conclusions
For control system the structural model an electro elastic engine is obtained. Its structural scheme is determined. The matrix of deformations an engine is constructed. The parameters and characteristics of an engine are obtained.
References
-
Schultz J, Ueda J, Asada H (2017) Cellular Actuators. Butterworth-Heinemann Publisher, Oxford, United Kingdom, pp: 382.
-
Afonin SM (2006) Absolute stability conditions for a system controlling the deformation of an electromagnetoelastic transducer. Doklady Mathematics 74(3): 943-948.
-
Uchino K (1997) Piezoelectric actuator and ultrasonic motors. MA: Kluwer Academic Publisher. Boston, pp: 350.
-
Afonin SM (2005) Generalized parametric structural model of a compound electromagnetoelastic transducer. Doklady Physics 50(2): 77-82.
-
Afonin SM (2008) Structural parametric model of a piezoelectric nanodisplacement transducer. Doklady Physics 53(3): 137-143.
-
Afonin SM (2006) Solution of the wave equation for the control of an electromagnetoelastic transducer. Doklady Mathematics 73(2): 307-313.
-
Cady WG (1946) Piezoelectricity: An introduction to the theory and applications of electromechanical phenomena in crystals. McGraw-Hill Book Company, New York, London, pp: 806.
-
Mason W (1964) Physical Acoustics: Principles and Methods. Volume 1, Part A. Methods and Devices. Academic Press, New York, pp: 515.
-
Yang Y, Tang L (2009) Equivalent circuit modeling of piezoelectric energy harvesters. Journal of Intelligent Material Systems and Structures 20(18): 2223-2235.
-
Zwillinger D (1989) Handbook of Differential Equations. Academic Press, Boston, pp: 673.
-
Afonin SM (2006) A generalized structural-parametric model of an elecromagnetoelastic converter for nano- and micrometric movement control systems: III. Transformation parametric structural circuits of an electromagnetoelastic converter for nano- and micrometric movement control systems. Journal of Computer and Systems Sciences International 45(2): 317-325.
-
Afonin SM (2006) Generalized structural-parametric model of an electromagnetoelastic converter for control systems of nano- and micrometric movements: IV. Investigation and calculation of characteristics of step-piezodrive of nano- and micrometric movements. Journal of Computer and Systems Sciences International 45(6): 1006-1013.
-
Afonin SM (2016) Decision wave equation and block diagram of electromagnetoelastic actuator nano- and microdisplacement for communications systems. International Journal of Information and Communication Sciences 1(2): 22-29.
-
Afonin SM (2015) Structural-parametric model and transfer functions of electroelastic actuator for nano- and microdisplacement. Chapter 9, In: Parinov IA (Ed.), Piezoelectrics and Nanomaterials: Fundamentals, Developments and Applications. Nova Science, New York, pp: 225-242.
-
Afonin SM (2017) A structural-parametric model of electroelastic actuator for nano- and microdisplacement of mechatronic system. In: Bartul Z, Trenor J (Eds.), Advances in Nanotechnology. Nova Science, New York, 19(8): 259-284.
-
Afonin SM (2018) Electromagnetoelastic nano- and microactuators for mechatronic systems. Russian Engineering Research 38(12): 938-944.
-
Afonin SM (2012) Nano- and micro-scale piezomotors. Russian Engineering Research 32(7-8): 519-522.
-
Afonin SM (2007) Elastic compliances and mechanical and adjusting characteristics of composite piezoelectric transducers. Mechanics of Solids 42(1): 43-49.
-
Afonin SM (2014) Stability of strain control systems of nano-and microdisplacement piezotransducers. Mechanics of Solids 49(2): 196-207.
-
Afonin SM (2017) Structural-parametric model electromagnetoelastic actuator nanodisplacement for mechatronics. International Journal of Physics 5(1): 9-15.
-
Afonin SM (2019) Structural-parametric model multilayer electromagnetoelastic actuator for nanomechatronics. International Journal of Physics 7(2): 50-57.
-
Afonin SM (2021) Calculation deformation of an engine for nano biomedical research. International Journal of Biomed Research 1(5): 1-4.
-
Afonin SM (2021) Precision engine for nanobiomedical research. Biomedical Research and Clinical Reviews. 3(4): 1-5.
-
Afonin SM (2016) Solution wave equation and parametric structural schematic diagrams of electromagnetoelastic actuators nano- and microdisplacement. International Journal of Mathematical Analysis and Applications 3(4): 31-38.
-
Afonin SM (2018) Structural-parametric model of electromagnetoelastic actuator for nanomechanics. Actuators 7(1): 1-6.
-
Afonin SM (2019) Structural-parametric model and diagram of a multilayer electromagnetoelastic actuator for nanomechanics. Actuators 8(3): 1-14.
-
Afonin SM (2016) Structural-parametric models and transfer functionsof electromagnetoelastic actuators nano- and microdisplacement for mechatronic systems. International Journal of Theoretical and Applied Mathematics 2(2): 52-59.
-
Afonin SM (2010) Design static and dynamic characteristics of a piezoelectric nanomicrotransducers. Mechanics of Solids 45(1): 123-132.
-
Afonin SM (2018) Electromagnetoelastic Actuator for Nanomechanics. Global Journal of Research in Engineering: A Mechanical and Mechanics Engineering 18(2): 1-7.
-
Afonin SM (2018) Multilayer electromagnetoelastic actuator for robotics systems of nanotechnology. Proceedings of the 2018 IEEE Conference EIConRus, pp. 1698-1701,
-
Afonin SM (2018) A block diagram of electromagnetoelastic actuator nanodisplacement for communications systems. Transactions on Networks and Communications 6(3): 1-9.
-
Afonin SM (2019) Decision matrix equation and block diagram of multilayer electromagnetoelastic actuator micro and nanodisplacement for communications systems. Transactions on Networks and Communications 7(3): 11-21.
-
Afonin SM (2020) Condition absolute stability control system of electromagnetoelastic actuator for communication equipment. Transactions on Networks and Communications 8(1): 8-15.
-
Afonin SM (2020) A Block diagram of electromagnetoelastic actuator for control systems in nanoscience and nanotechnology. Transactions on Machine Learning and Artificial Intelligence 8(4): 23-33.
-
Afonin SM (2020) Optimal control of a multilayer electroelastic engine with a longitudinal piezoeffect for nanomechatronics systems. Applied System Innovation 3(4): 1-7.
-
Afonin SM (2021) Coded сontrol of a sectional electroelastic engine for nanomechatronics systems. Applied System Innovation 4(3): 1-11.
-
Afonin SM (2020) Structural scheme actuator for nano research. COJ Reviews and Research 2(5): 1-3.
-
Afonin SM (2018) Structural–parametric model electroelastic actuator nano- and microdisplacement of mechatronics systems for nanotechnology and ecology research. MOJ Ecology and Environmental Sciences 3(5): 306‒309.
-
Afonin SM (2018) Electromagnetoelastic actuator for large telescopes. Aeronautics and Aerospace Open Access Journal 2(5): 270-272.
-
Afonin SM (2019) Condition absolute stability of control system with electro elastic actuator for nano bioengineering and microsurgery. Surgery & Case Studies Open Access Journal 3(3): 307–309.
-
Afonin SM (2019) Piezo actuators for nanomedicine research. MOJ Applied Bionics and Biomechanics 3(2): 56-57.
-
Afonin SM (2019) Frequency criterion absolute stability of electromagnetoelastic system for nano and micro displacement in biomechanics. MOJ Applied Bionics and Biomechanics 3(6): 137-140.
-
Afonin SM (2020) Multilayer piezo engine for nanomedicine research. MOJ Applied Bionics and Biomechanics 4(2): 30-31.
-
Afonin SM (2020) Multilayer engine for microsurgery and nano biomedicine. Surgery & Case Studies Open Access Journal 4(4): 423-425.
-
Afonin SM (2019) A structural-parametric model of a multilayer electroelastic actuator for mechatronics and nanotechnology. In: Bartul Z, Trenor J (Eds.), Advances in Nanotechnology. Nova Science, New York 22(7): 169- 186.
-
Afonin SM (2020) Electroelastic digital-to-analog converter actuator nano and microdisplacement for nanotechnology. In: Bartul Z, Trenor J (Eds.), Advances in Nanotechnology. Nova Science, New York, 24(6): 205- 218.
-
Afonin SM (2021) Characteristics of an electroelastic actuator nano- and microdisplacement for nanotechnology. In: Bartul Z, Trenor J (Eds.), Advances in Nanotechnology. Nova Science, New York 25(8): 251- 266.
-
Afonin SM (2021) Rigidity of a multilayer piezoelectric actuator for the nano and micro range. Russian Engineering Research 41(4): 285-288.
-
Nalwa HS (2004) Encyclopedia of Nanoscience and Nanotechnology. 10th (Vol.), American Scientific Publishers, Los Angeles.
-
Bhushan B (2004) Springer Handbook of Nanotechnology. Springer, New York, pp: 1222.
- Solution-Processed Chiral Perovskites for Biomedical Applications
- Nanotechnology in Health Chemistry and Medicine: Current Challenges and Future Directions
- Human Exposure to Micro- and Nanoplastics: Pathways, Toxicity, and Intervention Strategies
- Exosome Nanomedicine for Cancer Therapy
- Micro and Nanoplastics–Plastisphere, Biotoxicity, Impact on Human Health, and Mitigation Strategies
- Process Validation of Cefixime Powder for Suspension Dosage Form, 50 mL