Manifold Systems Applied Theory for Innovative Robotic Technology
Manifold systems applied theory for innovative robotic technology, namely the concept of Perfect Manifold Bundles (PMBs), is founded on the idea of processing information on many categories of attributes concurrently in the minimized basis of a manifold coordinate system. The underlying geometric principle allows the processing of several category-attribute sets simultaneously without paralleling calculation due to the total number of coordinate sets of this system generated by the combinational addition of the lower number of coordinate sets of the latter. Moreover, the set of the processed vector sets mutually uniquely matches the set of binary code combinations with vector-weighed bits. Algebraic summing of the bits is performed by taking into account the numerical values of the corresponding modules, which are definite dimensions, and dimensionality of the manifold coordinate system. Applications profiting from the manifold systems applied theory are for example robotic engineering devices and systems, big data processing, controlling dynamic objects in spatial coordinates according to several variable parameters concurrently, multidimensional signal processing, and other technology as an alternative to quantum ones.
Riznyk V¹* and Talan T²
¹Institute of Computer Sciences and Information Technologies, Lviv Polytechnic National University, Ukraine ²Applied Sciences Faculty, Ukrainian Catholic University, Ukraine Technologies, Lviv Polytechnic National University, Ukraine, Email: ikv.riznyk@gmail.com
Introduction
Manifold systems applied theory is a new subfield of combinatorial theory [1] that relates finding optimal solutions to problems connected from sets of subsets that have finite number of elements, where the subsets of feasible solutions are discrete. In such problems, exhaustive search is not high-quality, and so directed on algorithms that quickly rule out large parts of the search space or estimate algorithms must be resorted to instead. The object of study is the process of optimum vector data coding and processing multidimensional signals of the data under manifold coordinate systems for robotic technology. Unlike customary coding designs, the vector data puts it in a basis of the manifold coordinate system, where the basis is the smallest of the general number coordinate set, which it creates by combinatory summing the latter. This scientific method reduces to the indexing of multidimensional data in the basis of a manifold reference system, where the basis is a set of less than the total number of coordinates of this coordinate set. Theoretically, this is substantiated by the existence of an infinitely large number of minimized bases, which give rise to numerous varieties of multidimensional manifold coordinate systems to find wide practical applications in modern and future multidimensional robotic and information technologies. Therefore, the proposed approach opens prospects for the development of innovative robotic technologies grounded on the minimization of the basic structure of multidimensional coding systems and processing of big vector data in manifold reference systems. The subject of study is manifold data optimum coding methods for robotic technology.
Review of Literature
The main goal of modern information technology is the development of effective big vector data processing, including large data amounts analysis. Big vector data often involve several factors, such as national defense, economic, and other indexes of infrastructure, which have led to difficulties in large-scale data processing. In recent times, a great number of new concepts, parallel algorithms, processing tools, platforms, and applications have been suggested and developed to improve the value of big data [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12]. Big spatial vector data management presented in global review [1]. A comprehensive survey of the existing techniques and technologies from both academia and industry is given in [2]. The papers [3, 4, 5] present prospects and problems of big data for distant sensing. Techniques for composing a map procedure, which performs filtering, sorting, and summary operations of big vector data presented at the IEEE International Conferences on Data Engineering [6]. Developing a reversible rapid coordinate transformation big data model for the cylindrical projection, as we see in the paper [7]. The paper [8] contains fast multidimensional ensemble empirical mode decomposition for the analysis of big spatial- temporal datasets. The geometric computing algorithms are always very complex and time-consuming, which makes big spatial data processing very slow, or even impossible [9]. A framework that couples cloud and high-performance computing for the parallel map projection of vector-based big spatial data is regarded in Tang W, et al. [10, 11]. In the United States, large payer data amassed to explore large data to advance knowledge discovery in nursing methodologies, clinical trials, and lab research [12]. The idea of topological coordinates for toroidal chemical structures is in agreement with describing the physics of toroidal confined plasmas [13]. The projection provides large-scale spatial modeling of big data under a common coordinate system. However, the algorithmic complexity of the map projections represents a pressing computational challenge. Modern theory of combinatorial configurations are such spatial structures as perfect difference sets [14], algebraic constructions based on cyclic groups in extensions of Galois fields [15], manifolds [16], and structures connecting algebra through geometry [17]. However, the design based on the traditional theory is not always applicable to multidimensional data processing for the development of robotic technology as an alternative for quantum one.
Fundamentals
An n-stage cyclic sequence Kt= {K1, K2,…, Ki,…, Kn }, K1= (k11, k12, …, k1t), K2= (k21, k22, …, k2t), …, Ki = (ki1, ki2, …, kit), …, Kn = (kn1, kn2,…, knt), where we require a set of multi-modular combined vector-sums of the t-stage sub-sequences together with the vectors Kt for enumerate of coordinate set of a t-dimensional manifold coordinate grid m1×m2 …×mt is called the t-dimensional Perfect Manifold Bundle (PMB), mod1= m1, mod2 = m2 , …., modt = mt.
A chart of a t-dimensional cyclic sequence {K1, K2,…, Ki,…, Kn } for constructing the PMB is given in Figure 1.
A general model of the t-dimensional manifold coordinate system for vector data coding made from multidimensional combinatorial configurations that provide an ability to reproduce the maximum number of vectors in the system with a limited number n of appropriate basic vectors Kt for vector data processing needed a set of attributes and categories in an optimized basis of the manifold system. A t-dimensional manifold coordinate system designed for vector data coding t categories and mi attributes (i = 1, 2, …, t) requires t concurrent disjointed axes m1, m2, code forms a set of t-stage n-digital code combinations as t-modular (m1, m2 …, mt) sums of vector digit weights that allow an enumeration of a set of t-dimensional manifold coordinate grid m1×m2 …×mt., using minimum number n of code binary digits.
Figure 2 shows a symbolic view of projection t annular axes m1 , m2 , …, mt of the t-dimensional coordinate system with a common reference point “+” which covers a manifold surface to count the identified values of t-dimensional discrete signals on the coordinate grid formed by the non- intersecting annular axes for vector data processing set of attributes and categories in an optimized basis of the manifold system.
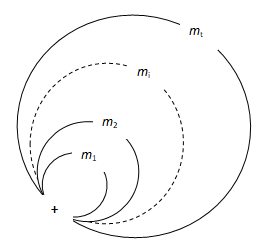
Each reference point in a system with t coordinates mutually unambiguously corresponds to a certain set of features of a t-dimensional discrete signal, and the set of reference points corresponds to a set of signal signs t-counting is carried out on t ring axes of the coordinate system according to the ordered sets of which mutually unambiguously correspond to a set of code combinations of t-dimensional vector-weighed n-bit binary code. In the general case, an optimized ultidimensional data system processing based on t-dimensional PMB {(k11, k12,…,k1t), (k21, k22, ..., k2t), … (kn1, kn2, ..., knt)} provides vector data coding sets of category attributes concurrently under a coordinate grid m1× m2 × … × mt. The underlying system provides vector data processing for robotic technology with vector-weighed n-digit binary code of nearly 2n code size [18].
Conclusion and Outlook
The proposed theory provides a new technique for improving the quality indices of robotic technology and systems based on the concept of Perfect Manifold Bundles (PMBs), which is founded on the idea of processing information on many categories of attributes concurrently in the minimized basis of a manifold coordinate system. Moreover, the perfection has been embedded in the underlying mathematical configurations. The remarkable properties and structural perfection of multidimensional PMBs are a development of the theory for robotic technology providing an ability to process data arrays in streaming mode by lists of attribute sets at the same time, ability to update completed tables with indexing of names, packages, procedures, etc. in the selected coordinate database, followed by processing in the database network. Data arrays can be described by multidimensional sets of attributes of arbitrary content at any level of indexing and theoretically infinitely by a large number of attribute categories. encryption of the processed data, for example, periodic renaming of coordinate axis numbers, reinsertion of vector weights, etc. for increasing the level of protection against unauthorized access when channeling through communication channels of converting multidimensional signals for robotic design. The prospects for the development of vector information technologies are opened based on the minimization of the basic sprovide an ability to structure of multi-dimensional information flow processing systems and the functionality of vector computer systems is expanded. At last, optimum vector combinatorial systems theory discovers direct application of the underlying scientific approach for novel robot design, and development perspective fundamental and applied researches in contemporary big vector information technologies, computing, systems engineering, and education. The manifold systems applied theory opens up prospects for the development of innovative robotic technology and big data processing as an alternative to quantum ones.
References
-
Xiaochuang Y, Guoqing L (2018) Big spatial vector data management: a review. Big Earth 2(1): 108-129.
-
Bose NR (2017) Applied Multidimensional Systems Theory. 2nd (Edn.), Springer International Publishing AG, pp: 192.
-
Chi M, Plaza A, Benediksson JA, Sun Z, Shen J, et al. (2016) Big data for remote sensing: Challenges and opportunities IEEE 104(11): 2207-2219.
-
Ma Y, Wu H, Wang L, Huang B, Ranjan R, et al. (2015) Remote sensing big data computing: Challenges and opportunities. Future Generation Computer Systems 51: 47-60.
-
Pekturk MK, Unal M (2017) A review on real-time big data analysis in remote sensing applications. 25th Signal Processing and Communications Applications Conference (SIU), Antalya, Turkey, pp: 15-18.
-
Eldawy A, Mokbel MF, Alharthi S, Alzaidy A, Tarek K (2015) SHAHED: A MapReduce-based system for querying and visualizing spatio-temporal satellite data. IEEE International Conference on Data Engineering, Seoul, South Korea, pp: 13-17.
-
Ye S, Yan T, Yue Y, Lin W, Li L, et al. (2016) Developing a reversible rapid coordinate transformation model for the cylindrical projection. Computers &Geosciences 89: 44-56.
-
Wu Z, Feng J, Qiao F, Tan Z (2016) Fast multidimensional ensemble empirical mode decomposition for the analysis of big spatio-temporal datasets. Philos Trans A Math Phys Eng Sci 374(2065): 20150197.
-
Ray S, Simion B, Brown AD, Johnson R (2013) A parallel spatial data analysis infrastructure for the cloud. ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, USA, pp: 284 - 293.
-
Tang W, Feng W (2014) Parallel map projection of vector- based big spatial data: Coupling cloud computing with graphics processing units. Computers, Environment and Urban Systems 61: 187-197.
-
Eldawy A, Mokbel MF, Jonathan C (2016) Hadoop Viz: A MapReduce framework for extensible visualization of big spatial data. The 32nd IEEE International Conference on Data Engineering, Helsinki, Finland.
-
DeLaney CW, Weaver CA, Warren JJ, Clancy TR, Simpson RL (2017) Big Data-Enabled Nursing: Education, Research and Practice. Springer, pp: 488.
-
Laszlo I, Rassat A, Fowler PW, Graovas A (2001) Topological coordinates for toroidal structures. Chemical Physics Letters: Elsevier Science BV 342: 369-374.
-
Hall M (1998) Combinatorial Theory. Wiley-Interscience, pp: 464.
-
Rotman J (1998) Galois Theory. 2nd (Edn.), Springer.
-
Lee JM (2000) Introduction to topological manifolds. Springer-Verlag, New York, pp: 395.
-
Moore EH, Pollatsek HS (2013) Difference Sets: Connecting Algebra, Combinatorics, and Geometry. American Mathematical Society, pp: 298.
-
Riznyk V (2024) Development of Vector Systems Applied Theory for Robotic Technology as an Alternative for Quantum One. Advances in Robotic Technology 2(1): 1-4.
- Group Consensus of Nonlinear Hybrid Multi-Agent Systems with Self-Triggering Event Mechanism
- Optimum Vector Combinatorial Theory and Its Applications
- Collaborative Robots: Human-Robots Coexistence in Industrial Environments
- Utilizing Idle Time for Job Clusters Reduces Inventory and Total Job Completion Time for Single Machine Scheduling
- Embracing the Future of Robotics with ART
- The Fascinating World of Cloud Robotics