Group Consensus of Nonlinear Hybrid Multi-Agent Systems with Self-Triggering Event Mechanism
The group consensus problem of nonlinear hybrid multi-agent systems (NHMAS) under self-triggering event mechanism is studied. First, a nonlinear agent dynamic model with mixed continuous and discrete states is established. Then a group consensus controller for hybrid multi-agent system (HMAS) is presented. Under the action of the controller, the agent only needs to interact with the state information of the neighbor agents in a local range, and the system can quickly realize the group consensus. Based on this definition and periodic sampling method, a self-triggering event mechanism is proposed. It can reduce the update frequency of the controller and thus reduce the energy loss by predicting the trigger time. Combined with graph theory and Lyapunov stability theory, it is proved that the proposed controller can achieve group consensus under the action of event-triggering mechanism. Finally, the correctness of the research conclusions is validated through simulation examples.
Abbreviations
NHMAS: Nonlinear Hybrid Multi-Agent Systems; HMAS: Hybrid Multi-Agent System.
Introduction
An agent is an individual with perception, learning, and decision-making capabilities. In a specific environment, it makes decisions and takes actions based on perceived information. A single agent may face limitations when dealing with complex or large-scale tasks, leading to the concept of multi-agent systems. Currently, this concept has been applied in computer science [1], robotics [2], pattern and image recognition [3], among others. At present, research focuses on consensus control [4], cooperative control [5], swarm and formation control [6]. The group consensus evolves from the basic concept of consensus and is more complex than traditional consensus problems. To meet specific requirements, corresponding controllers are provided to enable multi-agents in the system achieving subgrouping. The positional and velocity changes of agents within each subgroup will eventually converge to consistency, while differences will exist between different subgroups.
As research delves deeper into multi-agent systems, it becomes evident that real-world applications often do not strictly adhere to either continuous or discrete systems [7, 8]. Due to complex environments, situations with hybrid multi-agent systems emerge. In Xie G, et al. [9], the consensus problem of HMAS was addressed. In Lu M, et al. [10], the stability problem of second-order hybrid systems composed of multi-agents was solved, and by introducing new algorithms, the agents were ultimately able to achieve consensus. In Zheng Y, et al. [11], the consensus problem of hybrid systems composed of continuous and discrete agents was proposed, and stable conditions for the system were provided through research. In Zhao Q, et al. [12], the mean-square consensus problem of HMAS was studied. Based on data sampling control and considering the effects of delay and noise, conditions for mean-square consensus and an upper bound for delay were obtained. In Zheng Y, et al. [13], the bisectional consensus of HMAS composed of continuous and discrete agents was researched. By analyzing the interaction patterns of agents with different states, two effective hybrid multi-agent system consensus protocols were proposed. In Zhou Y, et al. [14], the consensus tracking problem of HMAS was studied, and a novel distributed consensus tracking control protocol was proposed. Building on the aforementioned studies, this paper investigates the consensus problem of HMAS. It considers NHMAS models and introduces the concept of hybrid group consensus, exploring the group consensus problem of NHMAS.
In the operation of multi-agent systems, individuals within the system need to continuously adjust their operational states through information exchange to accomplish their tasks. To reduce resource consumption in the system, researchers have introduced event triggered mechanisms [15]. In Wang Z, et al. [16], the problem of event- triggered consensus under collaborative control was studied, and a new event triggered mechanism for HMAS was proposed. In Li K, et al. [17], under the influence of event-triggering, the group consensus problem of HMAS was researched. A event-triggering mechanism, which does not rely on global information was introduced. To ensure that all agents can gradually achieve group consensus even in the case of discontinuous communication. Additionally, in Li B, et al. [18], a dynamic triggered mechanism was developed for the leader-following group consensus problem. This mechanism relies on auxiliary dynamic variables to effectively address the consensus issue. In Li H, et al. [19], proposed a new distributed triggered communication strategy was proposed for MAS under input saturation conditions, to achieve the group consensus under fixed topology. In Cai Y, et al. [20], for nonlinear systems affected by perturbations, a fixed triggering scheme was proposed, achieving formation tracking under reduced disturbance. Literature Chai X, et al. [21], studied the formation control problem of NHMAS, proposing an event-triggered strategy based on periodic sampling. Each agent synchronizes sampling and periodically monitors the event-triggering function. Therefore, based on the sampled control event-triggering method, this paper proposes a self-triggered event mechanism. In which can calculate and predict the next triggering time, further reducing the controller updates.
This paper makes the following innovations and contributions. We design a group consensus controller for NHMAS. Under the action of this controller, agents only need to interact with neighboring agents within a local range to exchange state information, enabling the system to achieve subgroup consensus quickly. Based on the sampled control event-triggering method, we further propose a self- triggering event mechanism. This mechanism can predict the next triggering time through calculations, thereby reducing the update frequency of the controller. Therefore, effectively lowering system energy consumption and reduce communication overhead. Since the self-triggering event mechanism samples and predicts based on a fixed cycle, it fundamentally avoids the Zeno phenomenon.
The structure of this paper is organized as follows. The second part constructs a HMAS model with nonlinear terms. And provides a definition for achieving group consensus. The third part introduces a distributed hybrid group consensus controller and the self-triggering event mechanism. Stability conditions for the system are provided, followed by stability analysis using Lyapunov stability theory. The fourth part conducts simulation examples using simulation software to validate the correctness of the conclusions.
Sign: R is a set of real numbers, R_m is a collection of real vectors. The rank transformation of matrix _A is A_T. The transposition of vector _p is p_T. _x−1 represents the inverse of the matrix. · x is the x-norm of the matrix.
Problem Statement
Preliminaries: The study in this paper is based on an undirected graph (denoted as x G ). Graph G = (V, ε, A) is used to represent the information interaction between agents. V = {1, 2......, N} denotes the set of nodes. } { ,i j V V ε ⊆ ∈ × represents the set of edges connecting nodes, containing all edges in G. The adjacency matrix of the graph is denoted as N N ij A a R × = ∈ . When node can receive the message transmitted by node, aij = 0; otherwise, aij = 1. The degree matrix of the graph is denoted as D = diag{d1,d2, ..., dN}, N = = ∑ i ij j d a . And define L as the Laplacian matrix of the graph, L = (lij)N ×N. Agent Dynamics Model
1 Consider a NHMAS consists of N agents, each with a dynamics model containing nonlinear terms. It is assumed that the M agent has continuous states while agents M + 1 to N have discrete states. The dynamics model of the entire NHMAS is represented as follows ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1 1 1
, , , x t f x t u t i I
ψ = + ∈ = + + = ∈
i i i M , , , ,
x t h f x t x t u t t c h i I I
ψ + (1) where n ix R ∈ , n iu R ∈ respectively represents the position state and control input. ( ) , n i f x t R ∈ denotes the nonlinear term. h1 represents the sampling time interval of the discrete agents.
i k i k i k i k k l N M
During the research process, whether it is the coupling between two different-state agents or the influence of nonlinear terms on the system, Both pose challenges to the study of system consensus. Therefore, through our research, we provide a definition of consensus for NHMAS. Definition 1: In a NHMAS, individuals can satisfy the following equation − = = ∈ − = = ∈ − = = ∈ (2) Then, the state of the NHMAS is considered to achieve group consensus. Assumption 1: Bounded nonlinear functions satisfy ( ) ( ) lim 0, , x t x t x x i I j i j i N t σ σ →∞ ( ) ( ) lim 0, , x t x t x x i I j k i k j i N t σ σ →∞ k ( ) ( ) , lim 0, , x t x t x x i I j i k j i N t t σ σ →∞ →∞ k ( ) ( ) , , σ − ≤ − i j i i f x t f x t v x x , (3) where υ > o, xσi is the grouping coefficient.
Main Results
Combining the event-triggered mechanism, we present a group consensus controller for NHMAS. To ensure that the provided controller can achieve group consensus in NHMAS. The controller is as follows = − + = ∈ ∈ = − + ∈ ∈ ( ) ( ) ( ) ( ) ∑ ∑ i i i i ij j i ij j M j N j N , , , + u t a x t x t l x t c h c N i I ψ α
2 ς ς σ ς ι ι ∈ ∈
t t ( ) ( ) ( ) ( ) )
∑ ∑ u t h a x t x t l x t t t i I I (4) Where ψ and α both represent control gains. xσj denotes the grouping coefficient, which can achieve group consensus through different implementations of xσj. cι can be taken 1, 2, 3......N. ( ) ( ) , i i k x t x t ς ξ respectively denotes the state at the latest triggering time of the corresponding agent.
i i i i i k ij j k i k ij j k k k N M j N j N , , ψ α
1 1 + ∈ ∈ ξ ξ σ ξ ξ t t
The definition of joint measurement is given ( ) ( ) ( ) ( )
∑ = − ∈ = − ∈
, , t a x t x t i I
ρ i ij j i M j N
∈ i ( ) ( ) ( ) ( )
∑ (5) , .
t a x t x t i I I
ρ i k ij j k i k N M j N
∈ i Based on the joint measurement method, the joint measurement error of the hybrid system is provided ( ) ( ) ( ) ) = − ∈ ∈ = − ∈ ∈ i i i i i i M , , , , e t t t t t t i I ρ ρ
1 ς ς ς + (6)
( ) ( ) ( ) )
i i i i k i k i k k k k N M
, , , .
e t t t t t t i I I
ρ ρ
1 ξ ξ ξ + In this section, an event-triggering mechanism is designed based on joint measurement errors and sampling detection methods. During the operation of the hybrid system, computations are performed according to the designed sampling instants. By computing the current state information of the agent, the next triggering instant is predicted. The obtained joint measurement error is then compared with the designed triggering threshold to determine whether the system controller needs to be updated. Furthermore, reducing the frequency of controller updates helps to save energy consumption.
The event-triggering condition is designed as follows ϑ ρ ϑ ϑ ρ ϑ ≤ = ∈ ∈ + ≤ = ∈ ∈ + ( ) ( ) , , , , 2 2 + e t t t c h c N i I
2 i s i s s M
ι ι ( ) ( )
, , , , 2 2
+ e t t t c h c N i I I (7)
1 i k i k k N M
ι ι In the equation, ϑ represents the control gain. Assuming the aforementioned h1 = h2 = h, it indicates that all agents in the studied HMAS have the same sampling period. Therefore, the above triggering condition can be defined as ( ) ( ) , , , . 2 2 ι ι ϑ ρ ϑ + ≤ = ∈ ∈ + i i N e k k k c h c N i I (8) To predict the next triggering instant, provide the growth rate ∆ei of the joint measurement error. Assuming that no triggering occurs at the next sampling instant k + 1, we have ( ) ( ) ( ) ( ) ( ) 1 1 ρ ρ ∆ = + − = + − i i i i i e k e k e k k k ( ) ( ) { ( ) ( )} ∑ = − + − − + −
1 1 a x k x k x k x k ij j j i i j N
∈ i ( ) ( ) *
∑ (9) =
i i ij i j N
.
h a p k j k ξ ξ ψ ρ ∈
i Where * ikξ represents the latest triggering time of neighbor of agent i. Observations show that ( ) ie k ∆ to ( ) i ie kξ ∆ stays the same until a new agent triggers.
The relevant parameters for the self-triggering event mechanism ξ ϑ δ ρ δ ϑ ( ) ( ) i b i b b i b b , , , 2 2 V e Z k l h = ∆ = = ⋅ + − = + − = = + Z K K K V C V (10) ( ) 1 1 1 , , .
δ δ υ δ υ − − −
b b b b b b b b p b b b
Where Vb represents the growth rate of the measurement error. Zb represents the threshold of error conditions. K_b represents the specific value of the measurement error reached at the current time δ_p. δp is the value of the step size of the table running multiplied by the sampling interval. CP represents the next trigger time predicted by the self- triggering event mechanism.
Theorem 1: Consider a NHMAS (1), under the event- triggering condition (6) and influence of the group consensus controller (4), when 2 2 2 2 0 M M n M n h γ ψ γ λ γ λ ψ −− < ≤ +
1
| ψ | L | +ψ | L | γ M |
|---|
and Proof: Combining the model of the NHMAS (1) and the controller (4), we can obtain = + − + − + ∈ + ∈ = + + − + ∈ ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ]
∑ ∑ i i i i k k i ij j k i k ij j M j N j N
, , , 1 , ,
x t x t t t f x t a x t x t l x t k k i I
ψ α ς ς σ ∈ ∈
i i ( ) ( ) ( ) ( ) ( ) ( ) 1
∑ ∑ (11) i i i k i k i ij j k i k ij j N M j N j N , , .
x t x t h f x t a x t x t l x i I I
ψ α ξ ξ σ + ∈ ∈
i i It can be concluded that triggering does not occur when the agents are at state (k, k + 1). Therefore, the above MAS can be uniformly written as = + + − + ∈ ∑ ∑ (12) Assumption ( ) ( ) ( ) ( ) ( ) ( ) 1 , , .
i i i k i k i ij j k i k ij j N j N j N x t x t h f x t a x t x t l x i I ξ ξ σ ψ α + ∈ ∈ i i T ( ) ( ) ( ) ( ) , ,..., , x k x t x t x t =
1 2 k k N k
T ( ) ( ) ( ) ( )
, ,..., , e k e t e t e t
=
1 2 k k N k
T ( ) ( ) ( ) ( )
, ,..., , k t t t
ρ ρ ρ ρ =
1 2 k k N k
T ( ) ( ) ( ) ( )
, ,..., , f k f t f t f t
=
1 2 k k N k
T ( ) ( ) ( ) ( )
, ,..., . σ σ σ σ x k x t x t x t
=
1 2 k k N k
Because of ( ) ( ) ( ) i p k p k e k ξ = + , the system (12) can be rewritten as ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1 , σ ψ α + = + + + + ∈ N x k x k h f k Lx k e k Lx k i I . (13) Construct the following Lyapunov function ( ) ( ) ( ) 1 . 2 = T V k x k Lx k (14) So, further one can obtain
1 ( 1) ( 1) ( 1) 2 1 ( ( ) ( ) ( ) ( ) ( )) ( ( ) 2 ( ) ( ) ( ) ( ))
T V k x k Lx k + = + +
T hf x x k hLx k he k hLx k L hf x α = + + + +
σ x k hLx k he k hLx k
α + + + + σ
1 ( ( ) ( ) ( ) ( ) ( ) ) 2 ( ( ) ( ) ( ) ( )).
T T T T T T T
x k hf x hx k L he k hLx k L L
α = + + + +
σ x k hLx k he k hLx k
α × + + + (15) Simplifying and rearranging the above equation (15), we get σ
1 ( 1) ( ( ) ( ) ( ) ( ) ( ) ( ) 2 ( ) ( ) ( ) ( ) ( )
2 2 2 T T T
V k x k Lx k hx k Lf k h f k Lf k ψ ψ ψ + = + + +
2 2 2 2 2 2
T T T T h x k L f k h e k Lf k h x k L L
ψ αψ × + + σ
2 2 2 2 2 2 2
T T ( ) ( ) ( ) ( ) ( )
f k h f k L x k h f k Le k h
ψ ψ α ψ × + + +
2 T T T T ( ) ( ) ( ) ( ) ( ) ( )
f k L x k h f k Lx k h x k L Lx k ψ ψ × + +
σ + + 2 T T T
( ) ( ) ( )
T ( ) ( ) ( )
he k Lx k h x k
L Lx k hx k L x k ψ ψα ψ +
σ
2 2 2 2 2 2 2 2
T T T T T ( ) ( ) ( ) ( ) ( )
h x k L L x k h e k L x k h x k L
ψ ψ ψ α + + +
σ
2 2 2 2 2 T T T T
( ) ( ) ( ) ( ) ( ) ( )
L x k hx k Le k h x k L Le k h e k ψ ψ ψ × + + +
2 2 2 2 T T T
( ) ( ) ( ) ( ) ( )
Le k h x k L Le k hx k L x k
ψ α αψ αψ × + + +
σ σ × + + 2 2
3 ( ) h x k L L x k h e k L x k
αψ α ψ σ σ σ ( )).
L x k × (16) Further, by solving the difference equation of the Lyapunov function, it is obtained that σ ( ) ( ) ( ) ( ) ( ( ) ( )
1 2 T T T
2 2 2 2 V k hx k Lf k h f k Lf k h x k ψ ψ ψ ∆ = + +
( ) ( ) ( ) ( ) ( )
T T T
2 2 2 2 2 L f k h e k Lf k h x k L Lf k ψ αψ × + +
σ ( ) ( ) ( ) ( ) ( )
T T T
2 2 2 2 2 2 2
h f k L x k h f k Le k h x k ψ ψ ψ + + +
( ) ( ) ( ) ( ) ( )
T T T
2 L x k h f k Lx k h x k L Lx k h
ψ ψ ψ × + + +
σ ( ) ( ) ( ) ( ) ( ) ( )
T T T T
2 e k Lx k h x k L Lx k hx k L x k ψα ψ × + +
σ ( ) ( ) ( ) ( ) ( )
T T T T
2 2 2 2 2 2 2 2
h x k L L x k h e k L x k h x k
ψ ψ ψ α + + +
σ × + ( ) ( ) ( ) ( )
( ) T T T
2
2 2 2 2 T L L x k h
x k Le k h x k L Le k h
ψ ψ ψ + + ( ) ( ) ( ) ( ) ( ) ( )
T T T T
2 2 2 e k Le k h x k L Le k hx k L x k
ψ α αψ × + +
σ σ ( ) ( ) ( ) ( )
T T T
2 2 2 2 2 2 2 2
h x k L L x k h e k L x k h
αψ αψ α ψ + + +
σ σ ( ) ( ))
T
3 .
x k L x k × (17)
σ σ Let ( ) ( ) p k Lx k = simplify the above equation to:
( ) ( ) ( ) ( ) ( ( ) ( ) ( )
1 2 T T T
2 2 2 2 2 V k h k f k h f k Lf k h p k Lf k ψ ρ ψ ψ ψ ∆ = + + +
( ) ( ) ( ) ( ) ( ) ( )
T T T T
2 2 2 2 2 h e k Lf k h x k L Lf k h f k Lp k × + +
αψ ψ σ ( ) ( ) ( ) ( ) ( ) ( )
T T T
2 2 2 2 2 h f k Le k h f k L x k h f k p k h
ψ α ψ ψ + + + +
σ ( ) ( ) ( ) ( ) ( ) ( ) ( )
T T T T T p k p k he k p k h x k L p k hp k ψ ψ ψα ψ × + + + σ ( ) ( ) ( ) ( ) ( ) ( ) T T T T
2 2 2 2 2 2
p k h p k Lp k h e k Lp k h x k L
ψ ψ ψ α × + + +
σ × + + ( ) ( ) ( )
( ) ( ) ( ) ( )
T T T
2 2
2 2 Lp k hp k e k h p k Le
k h e k Le k ψ ψ ψ +
( ) ( ) ( ) ( ) ( )
T T T T
2 2 2 2 2 h x k L Le k hp k Lx k h p k L
ψ α αψ αψ + + +
σ σ ( ) ( ) ( ) ( ) ( ))
T T
2 2 2 2 2 2 3 .
x k h e k L x k h x k L x k
αψ α ψ × + + (18)
σ σ σ σ ( ) ( ) 2 2 i i e k p k ϑ ϑ ≤ + and ( ) ) i i p k p k = − , we have ( ) ( ) i M i e k p k γ ≤ , and can Obtain From the inequality ( ) ( ) ( ) ( )
2 T T M e k e k p k p k γ ≤
( ) ( ) ( ) ( )
2 T T M n e k Le k p k p k γ λ ≤
( ) ( ) ( ) ( )
T T M p k e k p k p k γ ≤
( ) ( ) ( ) ( )
T T M n p k Le k p k p k γ λ ≤
( ) ( ) ( ) ( )
T T M e k p k p k p k γ ≤
( ) ( ) ( ) ( )
T T M n e k Lp k p k p k γ λ ≤
( ) ( ) ( ) ( )
T T n p k Lp k p k p k λ ≤
Where max 2 2 M ϑ γ ϑ = + and n λ are the largest eigenvalues of the Laplacian matrix L, so get
1 2 2 2 2 M n M n M n
( ) ( ) (
2 2 2 2 2 2 2
V k h h h h h
ψ ψ γ ψ λ ψ γ λ ψ γ λ ∆ ≤ + + + +
( ) ( ) ( ) ( ) ( ) ( ) ( )
T T T T T p k p k h f k p k h x k L p k hp k ψ ψα ψ × + + + σ ( ) ( ) ( ) ( ) ( ) ( ) T T T
2 2 2 2 2 2
f k h f k Lf k h p k Lf k h e k ψ ψ ψ × + + +
( ) ( ) ( ) ( ) ( )
T T T
2 2 2 2 2 Lf k h x k L Lf k h f k Lp k αψ σ ψ ψ × + + +
( ) ( ) ( ) ( ) ( )
T T T T T
2 2 2 2 2 h x k L Lp k h f k Le k h x k L
α ψ ψ α × + +
σ σ × + + ( )
( ) ( ) ( ) ( )
T T
2 2
2 2 2 Le k hp k Lx k h f k
2 2 2 2 . T T L x k h
αψ α ψ αψ + σ σ ( ) ( ) ( ) ( ))
p k L x k h e k L x k
αψ × + σ σ (19)
By using the properties of norms, we can manipulate the above equation to obtain ( ) ( ) (
1 2 2 2 2 M n M n M n
2 2 2 2 2 2 2
V k h h h h h
ψ ψ γ ψ λ ψ γ λ ψ γ λ ∆ ≤ + + + +
( ) ( ) ( ) ( ) ( )
T T M
2 2 2 2 p k p k h h L h L f k p k ψ ψ ψ γ × + + +
( ) ( ) ( ) ( )
T T M
2 2 2 2 h h L h L f k p k h x k
ψ ψ ψ γ ψα + + + +
σ ( ) ( ) ( ) ( )
T T T
2 2 2 2 2 L p k h f k L f k h x k L
αψ αψ × + + σ ( ) ( ) ( ) ( )
T T
2 2 2 2 2 2
f k ah x k L p k h x k L
ψ ψ α × + +
σ σ ( ) ( ) ( ) ( ) ( )
T T
2 2 2 e k h p k L x K h f k L x k
αψ α ψ × + +
σ σ + ( ) ( ) ) 2 2 2 . T h e k L x k σ αψ +
( ) ( ) T
2 2 2 h p k L x k
αψ σ (20) Splitting equation (20) into ( ) ( ) ( ) 1 2 , V k V k V k ∆ ≤∆ + ∆ where
1 2 2 2 2 ( ) ( ) (
2 2 2 2 2 2 2 1
V k h h h h h
ψ ψ γ ψ λ ψ γ λ ψ γ λ ∆ = + + + +
M n M n M n
( ) ( ) ( ) ( )
T T M
2 2 2 2 p k p k h h L h L f k ψ ψ ψ γ × + + +
× + + + (21) ( ) ( ) ( ) ( ) )
T M
2 2 2 2 .
p k h h L h L f k p k ψ ψ ψ γ By computation, it can be obtained that when ( ) 2 2 2 0 2
1 M n n M n h γ −− < ≤ + + and ( )
M h L L ψ γ − ≤ + , then 1 0 V ∆ ≤ .
M ψ γ λ λ γ λ ( ) ( ) ( ) ( ) ( ) (
1 2 T T T
2 2 2 V k h x k L p k h f k L f k ψα αψ ∆ = × +
σ ( ) ( ) ( ) ( )
T T
2 2 2 2 2 2
h x k L f k h x k L p k αψ ψ α + +
σ σ ( ) ( ) ( ) ( )
T T
2 2 2 ah x k L e k h p k L x k
ψ αψ + + σ σ ( ) ( ) ( ) ( )
T T
2 2 2 2 2 2
h f k L x k h p k L x k
α ψ αψ + + σ σ ( ) ( ) )
T
2 2 2 .
h e k L x k
αψ + (22) When 0 α ≤ , then 2 0 V ∆ ≤ In summary, under σ assumption 1, when 2 2 2 2 0 M M n n M n h γ ψ γ λ ψλ γ λ ψ −− < ≤ + + and 1 , 0, M h L L α ψγ ψ γ − < ≤ + + then 0. V ∆ ≤ Through the Lyapunov stability criterion of the discrete system, we deduce that the system satisfies the stability condition.
Through analysis, it is obtained that when ( ) 0 ip k =
then ∆V(k) = 0. When ( ) 0 ip k = , due to ( ) ) i i p k p k = − , it follows that ( ) 0 ip k = , and subsequently ( ) 0 ie k = . Then, through equation (5), it is found that ( ) ( ) , i k i p t p t equals 0. Combined with the provided definition of joint measurement, it is inferred that the NHMAS studied in this chapter achieves group consensus.
The event-triggering condition designed in this chapter samples with a time interval of h, ensuring a lower bound on the time interval between any two triggering instants. This fundamentally avoids the occurrence of Zeno phenomenon.
Numerical Simulation
Consider a NHMAS composed of 6 agents, where agents 1, 2, and 3 represent continuous agents, and agents 4, 5, and 6 represent discrete individuals. The communication network is shown in Figure 1.
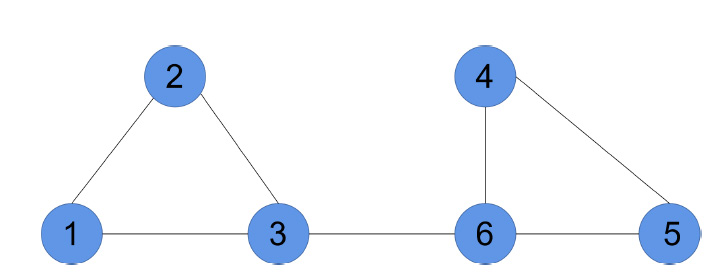
From the above figure, the Laplacian matrix L of the system can be obtained
2 1 1 0 0 0
− − − − − − − = − − − − − − − .
The sampling cycle time h = 0.2s, α = −1 is selected according to the proof in the above section. The nonlinear term ( ) ( ) ( ) [ ] , sin , 0 7 4 0 5 8 12 T i f x t x t x = = − − is selected as the initial position state of 6 multi- agents.
The final simulation results are as follows
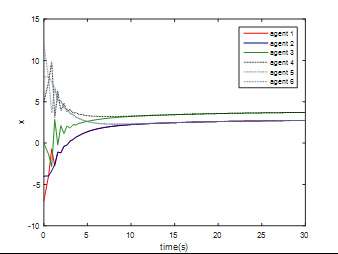
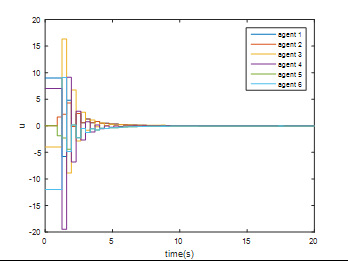
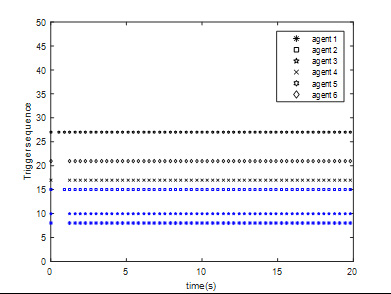
Simulation Result Analysis. Figure 2 intuitively demonstrates the dynamic evolution of the positions of multi- agents with different states in the hybrid multi- agent system over time. Under the regulation of the group consensus controller, the six agents successfully achieve clustering into subgroups. Where agents 1 and 2 form independent subgroups. As time progresses, the position trajectories within each subgroup gradually converge, reaching a consistent state. Figure 3 reveals the regular variation of control inputs over time for each agent. Under the action of the self-triggering event mechanism, the control inputs exhibit a step-like change pattern. Indicating that control inputs are updated only when the system satisfies specific event-triggering conditions. Otherwise, they remain unchanged from the previous triggering instant until new triggering conditions are met. Figure 4 visually displays the specific triggering time sequence for each agent under the self-triggering event mechanism. It can be observed from the figure that the triggering times of agents exhibit a discrete distribution, further demonstrating the effectiveness of the event-triggering strategy in optimizing resource utilization and reducing communication burden. In summary, the NHMAS achieves stable operation and attains group consensus under the combined action of the self-triggering event mechanism.
Conclusion
The article had explored the group consensus problem of NHMAS based on the self-triggered event mechanism. It had first presented the dynamic model of HMAS with nonlinear terms and defined group consensus. Then, a distributed hybrid agent group consensus controller had been proposed. To effectively reduce the inter-action between agents and the controller update, a self-triggered event mechanism has been introduced. This method had been able to compute the next triggering time in advance. Then further reducing the controller update and fundamentally avoiding the Zeno phenomenon. Through Lyapunov theory, it had been proven that the controller could achieve subgroup consensus under the action of the self-triggered event mechanism. Finally, simulation examples had been used to further verify the feasibility of the theoretical results.
Acknowledgements
This research was supported by the National Natural Science Foundation of China for Young Scientists, un- der Grant Number 62103145 and Jiangxi Provincial Natural Science Foundation under Grant 20242BAB25108.
References
-
Vinoth S, Vemula HL, Haralayya B, Pradeep M, Mohammed FH, et al. (2022) Application of cloud computing in banking and e-commerce and related security threats. Materials Today: Proceedings 51(8): 2172-2175.
-
Li S, Awale SA, Bacher KE, Buchner TJ, Santina CD, et al. (2022) Scaling up soft robotics: A meter-scale, modular, and reconfigurable soft robotic system. Soft Robotics 9(2): 324-336.
-
Zhang Q, Xu Y, Zhang J, Tao D (2023) Vitaev2: Vision transformer advanced by exploring inductive bias for image recognition and beyond. International Journal of Computer Vision 131(1): 1-22.
-
Xu K, Meng B, Wang Z (2023) Design of data-driven mode-free iterative learning controller based higher order parameter estimation for multi-agent systems consistency tracking. Knowledge-Based Systems 261(2023): 110-119.
-
Bao G, Ma L, Yi X (2022) Recent advances on cooperative control of heterogeneous multi-agent systems subject to constraints: A survey. Systems Science and Control Engineering 10(1): 539-551.
-
Hou HQ, Liu YJ, Lan J, Liu L (2023) Fixed time formation control for heterogeneous multi-agent systems with partial unknown control directions. International Journal of Adaptive Control and Signal Processing 37(9): 126-144.
-
Abdollahipour R, Khandani K, Jalali AA (2023) Consensus of uncertain linear multi-agent systems with granular fuzzy dynamics. International Journal of Fuzzy Systems 24(4): 1780-1792.
-
Zhang H, Feng T, Liang H, Luo Y (2022) LQR-based optimal distributed cooperative design for linear discrete-time multiagent systems. IEEE Transactions on Neural Networks and Learning Systems 28(3): 599-611.
-
Xie G, Wang L (2007) Consensus control for a class of networks of dynamic agents. International Journal of Robust and Nonlinear Control: IFAC-Affiliated Journal 17(10-11): 941-959.
-
Lu M, Wu J, Zhan X, Han T, Yan H (2022) Consensus of second-order heterogeneous multi-agent systems with and without input saturation. ISA Transactions 126: 14- 20.
-
Zheng Y, Ma J, Wang L (2017) Consensus of hybrid multi- agent systems. IEEE Transactions on Neural Networks and Learning Systems 29(4): 1359-1365.
-
Zhao Q, Zheng Y, Zhu Y (2020) Consensus of hybrid multi-agent systems with heterogeneous dynamics. International Journal of Control 93(12): 2848-2858.
-
Zheng Y, Zhao Q, Ma J (2019) Wang L Second-order consensus of hybrid multi-agent systems. Systems and Control Letters 125: 51-58.
-
Zhou Y, Wen G, Wan Y, Fu J (2023) Consensus tracking control for a class of general linear hybrid multi-agent systems: A model-free approach. Automatica 156(12): 111198.
-
Dimarogonas DV, Frazzoli E, Johansson KH (2011) Distributed event-triggered control for multi-agent systems. IEEE Transac- tions on Automatic Control 57(5): 1291-1297.
-
Wang Z, Gao Y, Liu Y, Wang S, Wu L (2022) Distributed dynamic event-triggered communication and control for multi-agent consensus: A hybrid system approach. Information Sciences 618: 191-208.
-
Li K, Ji L, Yang S, Li H, Liao X Couple-group consensus of cooperative-competitive heterogeneous multiagent systems: A fully distributed event-triggered and pinning control method. IEEE Transactions on Cybernetics 52(6): 4907-4915.
-
Li B, Xu B, Zhang D (2023) Leader-following group consensus of fractional-order multi-agent systems via a dynamic event-triggered control strategy. IEEE Transactions on Control of Network Systems 4(6): 419- 428.
-
Li H, Cao J (2023) Event-triggered group consensus for one-sided Lipschitz multi-agent systems with input saturation. Commu- nications in Nonlinear Science and Numerical Simulation 121: 1072-1084.
-
Cai Y, Zhang H, Wang Y, Zhang J, He Q (2021) Fixed-time time-varying formation tracking for nonlinear multi- agent systems under event- triggered mechanism. Information Sciences 564: 45-70.
-
Chai X, Wang Q, Diao Q, Yu Y, Sun C (2022) Sampled- data-based dynamic event-triggered formation control for nonlinear multi-agent systems. Transactions of the Institute of Measurement and Control 44(14): 2719- 2728.
- Optimum Vector Combinatorial Theory and Its Applications
- Manifold Systems Applied Theory for Innovative Robotic Technology
- Collaborative Robots: Human-Robots Coexistence in Industrial Environments
- Utilizing Idle Time for Job Clusters Reduces Inventory and Total Job Completion Time for Single Machine Scheduling
- Embracing the Future of Robotics with ART
- The Fascinating World of Cloud Robotics