Mini Tractor Operated Groundnut Digger Cum Inverter: A Concept
Groundnut holds a pivotal role in Indian agriculture, serving as a critical crop contributing to both the economic and nutritional sectors of the country. Timely harvesting of groundnut is a crucial phase in its cultivation, particularly during peak seasons, when labor shortages can lead to delays, resulting in significant yield losses. To mitigate labor constraints during peak harvesting periods and ensure timely operations, a conceptual model of a groundnut digger has been proposed. This digger is designed to uproot, collect, and transport groundnut plants, inverting them as it moves through the field. The groundnut digger consists of two primary units: a digging unit and a conveying unit. The digging unit is engineered to penetrate the soil to a precise depth, extracting the groundnut plants along with the attached pods to the surface. The conveying unit is responsible for lifting the plants and transporting them to a pod-inverting mechanism, which inverts the plant to reduce the risk of aflatoxin contamination in the pods due to excessive soil moisture.
Introduction
Groundnut (Arachis hypogaea), a key oilseed and cash crop, is cultivated primarily for its high content of edible oil, proteins, and carbohydrates [1]. It serves as a significant source of essential nutrients and remains an economically accessible commodity. Groundnut seeds contain 22-30% protein and 44-56% oil on a dry weight basis, making them a rich source of macronutrients. Additionally, they are abundant in minerals such as phosphorus (P), calcium (Ca), magnesium (Mg), and potassium (K), along with vitamins E, K, and various B-complex vitamins. Groundnut harvesting is typically performed when a majority of the plant’s leaves turn yellow, and the pods reach full maturity, becoming firm and hardened.
Groundnut (Arachis hypogaea) develops its fruit below the soil surface, necessitating excavation for pod retrieval. Typically, the groundnut pods are situated at a depth of 7 to 10 cm beneath the soil, in a region referred to as the “pod zone” [2]. This zone requires precise mechanical or manual digging operations to bring the pods to the surface for harvesting. In many regions, groundnut harvesting is predominantly carried out using traditional methods, where the plants are manually uprooted using labor, then bundled and left to dry to facilitate the manual stripping of pods from the plants. This manual process, including harvesting and threshing, typically requires 84 man-hours per hectare. A significant issue associated with this method is labor scarcity during the harvesting period, which can lead to delays. These delays, caused by the non-availability of labor at peak harvest times, can result in substantial yield losses for farmers [3].
Mechanical harvesting of groundnut involves the use of equipment such as blade-type harvesters and digger-shakers. The digger-shaker performs three operations simultaneously: it penetrates the soil to uproot the groundnut crop, shakes the plants to remove soil from the pods, and arranges the uprooted plants into windrows. The operational capacity of the digger-shaker ranges between 0.6 and 0.8 hectares per hour, depending on field conditions. While traditional groundnut harvesting methods are labor-intensive, time- consuming, and physically demanding—requiring workers to uproot plants in a bent posture—the blade-type and digger- shaker harvesters reduce labor and time by mechanizing the uprooting process. However, manual labor is still required for subsequent operations, such as collecting the plants and inverting them for drying. The inverting process is critical in preventing aflatoxin contamination in the pods after digging.
To optimize groundnut harvesting, complete mechanization is proposed as a solution. This would involve the development of a groundnut harvester capable of not only uprooting the plants but also conveying and inverting them efficiently, thereby reducing labor costs and improving both productivity and profitability. Factors influencing the design of groundnut harvester are as follows.
Methodology
Groundnut (Arachis hypogaea) thrives in tropical climates, requiring 50–125 cm of well-distributed rainfall, abundant sunlight, and temperatures between 21°C and 26.5°C. It prefers well-drained sandy or sandy loam soils, which facilitate peg penetration, pod development, and harvesting. During ripening, a month of warm, dry weather is ideal. Optimal yields are achieved in soils with a pH of 6.0–6.5 [4]. As per the agronomy view soil and crop parameters are also important for engineering considering while develop machine. Soil parameters like, Soil type; Soil moisture content; Bulk density and Cone index of soil. Crop parameters like, cropping pattern; Variety; Plant height; Plant canopy; Plant population; Row to row spacing and Pod zone depth.
Functional Requirement of Groundnut Digger Cum Inverter
Following functional requirements were considered for developing a new machine.
- The design should be simple and easy to fabricate, utilizing locally available materials to facilitate manufacturing.
- All components should be easily assembled and disassembled to allow for inspection, maintenance, and repair.
- The implement should be compatible with tractors in the 15 to 25 horsepower range, which are commonly used on Indian farms.
- The machine should leave groundnut pods uncovered on the soil surface behind the tractor, allowing for faster drying compared to existing diggers and minimizing pod loss during the digging process.
- The machine should minimize damage to groundnut pods, including cuts, crushing, slicing, and bruising.
- The machine should dig the groundnuts in a manner that minimizes the amount of soil adhering to the pods.
- The depth of digging should be controlled by a hydraulic mechanism.
- Pod losses should be minimized by employing a V-shaped digging blade.
- The design should be simple, structurally robust, and capable of efficient performance.
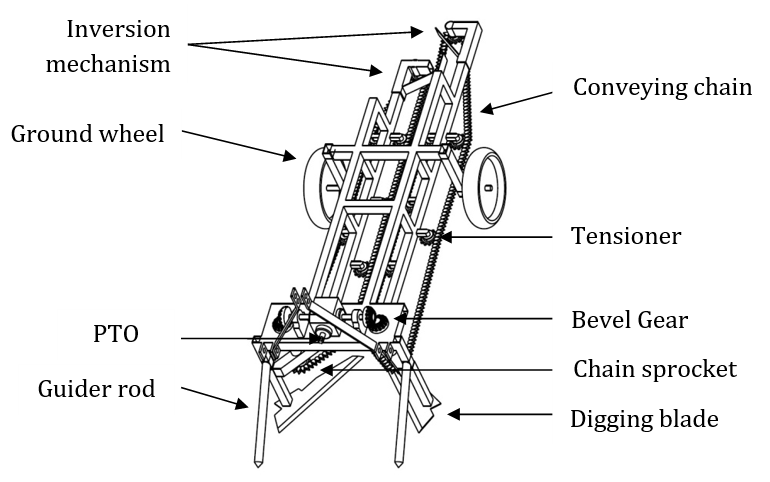
- The Groundnut Digger Cum Inverter Comprise of the Following Unit **
- Digging Unit- To dig the soil and uproots the groundnut plant.
- Conveying Unit- To convey the uprooted plant to the plant inversion mechanism.
- Inverting Mechanism** – To invert the plant by inverted rod (Figure 1).
Digging Unit
The V type blade will be selected for digging of the root crop for easy penetration and reducing draft [5, 6].
Width of the Digging Blade
Effective zone of sweep type blade is determined by following formula [7].
s 2 tanO fz W d = +
Where, Zf = effective zone of blade, cm W = width of blade, cm D = operating depth, cm Øs= angle of internal friction (10° to 30°)
Conveying Unit
A chain-type conveying mechanism will be employed for the harvester, featuring an adjustable conveyor angle ranging from 25° to 45° to accommodate different crop conditions and ensure efficient transportation. The linear velocity of the conveyor chain will be calibrated according to the forward operational speed of the harvester. To prevent plant blockages at the picking point, the conveyor chain’s linear velocity should match or slightly exceed the tractor’s forward speed, but should not surpass 110% of the tractor’s speed [8].
Result and Discussion
The groundnut digger concept is engineered to carry out digging, conveying, and inverting of the plants simultaneously, which helps to minimize both time and labor expenses in the harvesting process. Early assessments of the design have shown promising results. To thoroughly evaluate its efficiency in groundnut harvesting, the machine must undergo the next stages of development, including initial design, detailed design, prototype creation, testing, and performance analysis.
Conclusion
The developed groundnut digger-cum-inverter is efficient to operate and maintain during field harvesting. Its function is crucial in reducing labor costs and shortening the drying period of groundnut before threshing. Proper drying of groundnut is beneficial in minimizing aflatoxin contamination during post-harvest drying. The cost of the groundnut digger-cum-inverter is comparable to that of other agricultural machinery and is affordable for farmers. Adoption of this technology can enhance groundnut quality while reducing operational costs.
References
-
Lakhani AL, Vagadia VR (2023) Development and performance evaluation of shelling unit of power operated groundnut decorticator. International Journal of Agricultural Sciences 19(1): 254-260.
-
Lakhani AL, Dhruvkumar JF, Verma K, Khanpara BM, Bharad NB, et al. (2024) Investigation on soil and groundnut plant characteristics for the design and development of groundnut digger cum inverter. Plant Archives 24(2): 415-421.
-
Padmanathan PK, Kathirvel K, Manian R, Duraisamy VM (2006) Design, development and evaluation of tractor operated groundnut combine harvester. Journal of Applied Sciences Research 2(12): 1338-1341.
-
Singh C (2001) Modern techniques of raising field crops. 14th printing, Oxford and IBH Publishing Co. Pvt. Ltd., New Delhi, India, pp: 263-278.
-
Suryawanshi SH, Kathirvel K, Shridar B (2009) Comparative Evaluation of Different Groundnut Digging Blades. Agricultural Mechanical in Asia, Africa and Latin America 40(1): 9-11.
-
Amin EA, Ismail ZE, El-shabrawy TH, Faleih HS (2014) Influence of some factors affecting carrot harvesting. J Soil Sci Agric Eng 5(6): 911-922.
-
Sharma DN, Mukesh S (2013) Textbook of Fram Machinery Design, Principles and Problems. 3rd (Edn.), Jain Brothers, New Delhi, India.
-
Nour MA, Shal-El MS, El-Shazly MA, Ali MM (2016) Development of a harvesting machine for peanut. Zagazig Journal of Agricultural Research 43(6): 2225-2236.
- The Expanding Landscape of Road Rage: A Systematic Review of Conflicts Involving Drivers, Pedestrians, and Micromobility
- Validating Cognitive Models of Royal Navy Performance on Control Systems
- Comparing Standard and State-of-the-art Firefighter Coats on Postural Balance and Gait in a Live Burn Environment
- Investigating the Integration of Telemedicine into Clinicians Workflow: A Review of Methods
- Risk Assessment of Ergonomic Factors in a Textile Firm by RULA, REBA and Fine Kinney Methods
- Impact of Self-Esteem Training on Individuals with Disabilities Aged 17-30